Miniature of the truck and trailer system used in the experiments.
Control of truck and trailer vehicles (2000)by Alberto Speranzon and Claudio Altafini |
The aim of the project was the design and implementation of a control system for driving backward a multibody vehicle, as shown in the next Figure.
|
Miniature of the truck and trailer system used in the experiments. |
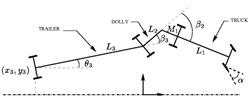
The main challenge in controlling such system is the presence of saturations both in the actuator (front steering wheels) and the relatives angles between the single parts of the truck (angle Truck/Dolly and angle Dolly/Trailer as shown in the next Figure). When one or both of the relative angles beta2 and beta3 reach the staturation then the system is in a configuration named Jack-Knife which does not allow the truck and trailer to be moved backwards.
 |
|
Skecth of the Truck with the Trailer and Dolly. |
In the next Figure is shown the miniature used in the experiment in a Jack-Knife configuration with both relative angles beta2 and beta3 at saturation.
 |
Miniature of the truck and trailer system in Jack-Knife configuration. |
 Click to play |
 Click to play |
 Click to play |
 Click to play |
Videos require the DIVX codec installed.