Systems Biology
Systems Biology aims at providing the mathematical tools necessary to turn the wealth of experimental data that the field of Biology is nowadays producing into models of descriptive nature and predictive power. More details on this line of research is available in the Systems Biology group web-page
Control problems for quantum mechanical systems
Consider a closed quantum mechanical system and assume that a "forcing"
field can be pointed exactly at it; this could be for example a laser of
suitably high frequency. The resulting system is described by a Hamiltonian
composed of two parts, the free part and the interaction part, that obey to a
time-dependent Shroedinger equation. If we work with the approximation
of a finite number N of energy levels for our system, then the time evolution
operator of the wavefunction is a unitary operator leaving on the Lie group
SU(N) and in control terms it can be interpreted as a right invariant control
system on a matrix Lie group with a drift vector field and an input vector
field. Thus achieving desired target states for the wavefunction can be
studied as a reachability problem and producing the laser pulse sequence
that steers the quantum state to the target can be seen as a constructive
controllablity problem.
Closed systems are almost always controllable
As soon as the energy levels of a quantum mechanical system are all different and not equispaced, the system is controllable. This is shown
here using the root space decomposition of a compact semisimple Lie algebra.
Open systems are never controllable
A system is open if it interacts with the environment (as one may expect,the "closed" systems mentioned above are not "open" i.e., they have no exchange with the bath). Normally an open system is modeled as a Markovian semigroup through the so-called Lindblad (or Gorini-Kossakovski-Sudarshan) operator. It can be shown (see this paper) that this dissipation implies a lack of small-time controllability for any type of unitary control. Thus the control cannot locally modify the irreversible character of the system.
Motion planning and invariance by symmetry on Lie groups
Most autonomous vehicles have as configuration space the Special Euclidean
group SE(3) or one of its subgroups. SE(3) is the Lie group of
rotations and translations in three dimensional space. Planning a trajectory
in SE(3) can be done for example via the Wei-Norman formula or solving an optimal control problem. In order to simplify the task, the attempt is to
combine the trajectory generation with the natural reduction
that derives
from the use of left/right invariant representations on the group.
Reachability analysis for switching systems
The accessibility problem for a switching system i.e., a family
of plants together with a logic that allows to choose uniquely one single
mode at each time is studied. When the plants are linear and the logic is
controllable a switching system resembles a classical bilinear system. However, the reachable set is in general only a semigroup (i.e. the system "drifts")
even when the system is driftless.
Robotics
Most of this work dates to my PhD years that I spent at KTH, working in the Division of Division of Optimization and Systems Theory.
Kinematic wheeled robots
 The typical configuration
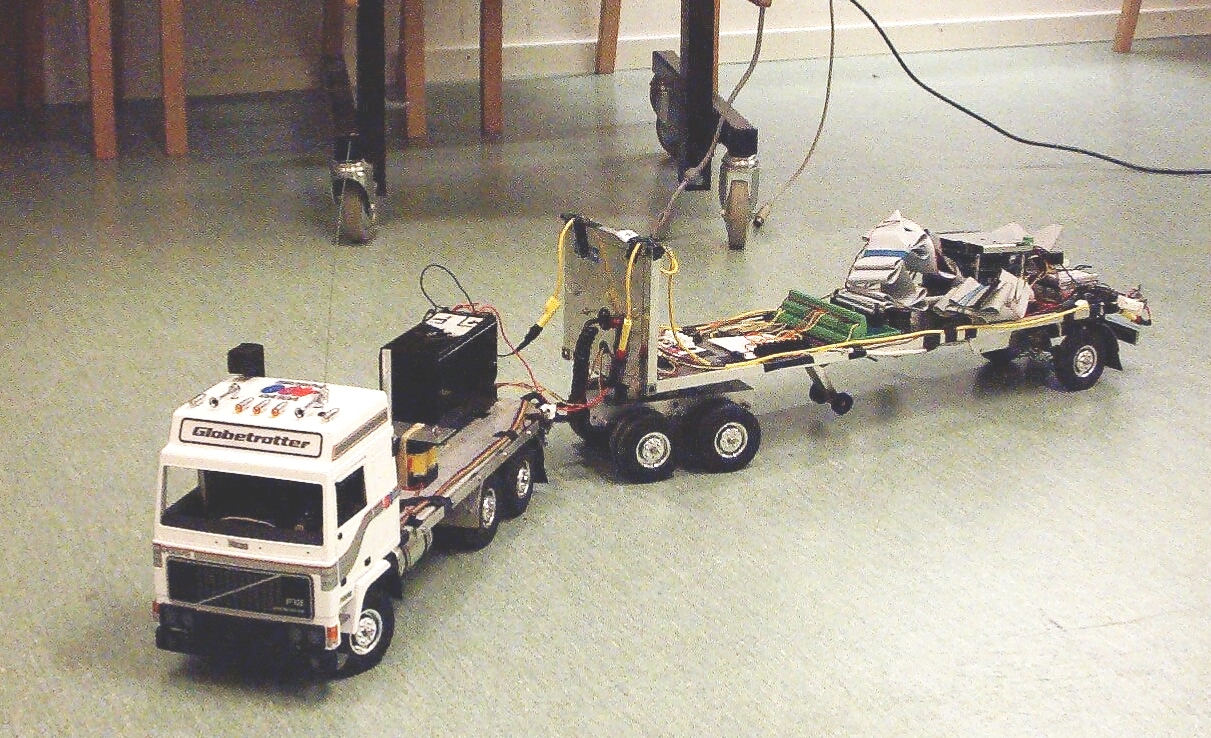
is a car-like vehicle pulling a generic number of trailers. The toy truck
and trailer shown in the picture is at the Automatic
Control Group of the S3 Department, at KTH and was used as test-bed of the algorithms.
The typical configuration
is a car-like vehicle pulling a generic number of trailers. The toy truck
and trailer shown in the picture is at the Automatic
Control Group of the S3 Department, at KTH and was used as test-bed of the algorithms.
Switching controllers for backward driving
When driving backward, the different bodies of the vehicle in the picture
tend to collide with each other in what is normally called a jack-knife
type of saturation. From a control theory point of view, the system is
an unstable nonlinear systems with state and input saturations. If for example
we try to reverse along a straight line, a locally stabilizing controller
is not sufficient to guarantee convergence from all initial conditions because
of the saturations. The scheme we implemented is based on a switching controller
that whenever the vehicle tends to a jack-knife configuration it reallignes
the multibody by driving forward until the state enters into the region of
attraction of the backward controller. Complete state information allows
to represent this as an extra logic feedback loop around the local controllers
for backward and forward motion. The work is described here and a few videos of the experiments are available
at the project
web-page .
Path following with reduced off-tracking
For this kind of system, the notion of off-tracking distance from
a given path has been introduced: it corresponds to consider the distance
of the whole vehicle from the path and it leads to the definition of an
alternative path tracking criterion aiming at minimizing the clearance needed
around a desired trajectory in order for the same to be physically feasible
and compatible with the nonholonomic constraints of the vehicle. Asymptotic
stability can be proved also for paths of varying curvature, treating it
as a nonlinear output regulation problem.
The general n-trailer
A generalization of the n-trailer configuration, in order to admit more
realistic off-axle hitching between trailers, has been investigated: properties
like controllability, singularity locus and existence of canonical forms
have been characterized.
Mobile manipulation
Manipulation as is normally considered is static i.e. the robot arm is rigidly
mounted on a fixed platform. Obviously, this implies a limitation in the
range of action of the arm. To improve the potentiality of a robotic manipulator
it is natural then to provide the arm of an actuated mobile base. In this
way, the accessible workspace of a mobile manipulator is increased
at will. Manipulation is a crucial part of the Intelligent Service Robot
(ISR) project of the Center for Autonomous
Systems at KTH. Clearly, the effective integration of manipulation and motion
can increase the range of applications of the robot, not only its efficiency.
Basic research topics for the system include motion planning
and trajectory tracking. Since the overall system has more
independent actuators than degrees of freedom of the end-effector, the problem
of constructively use the
internal configuration redundancy is also
relevant, in order to avoid singularities and to plan efficient working strategies.
Trajectory generation for robotic chains
Motion planning techniques for the coordinate motion are needed: for
example a theoretical investigation of the possibility of extending the
inverse kinematic algorithms of static manipulators to our more general case
is desirable in order to generate open-loop control laws for the system.
The motion of the end effector of our system
can be viewed as a rigid body transformation in the Special Euclidean Group
SE(3). The total motion of the end-effector can then be decomposed into the
product of simpler transformations in subgroups of SE(3) each of them representing
the evolution of a link or a joint of our mobile manipulator. An advantage
of this theoretical framework is that it allows to treat in the same way simple
rotations of one-degree of freedom joints, as those of the arm, as well as
more complicated motions like the movement in the plane of the mobile base.
Splines on SE(3)
For motion planning purposes, smooth trajectories are needed in order
to describe the rototranslations of the end-effector in 3D space. The idea
is to extend the
De Casteljau construction of a smooth curve from boundary
data to SE(3). Such an algortihm needs the notion of straight line, i.e.
geodesics which is not a univoque concept on SE(3).
See also the animations
for a comparison of the two most common metric structures on SE(3).
|